【全站(zhan)儀(yi)(yi)功(gong)能(neng)】全站(zhan)儀(yi)(yi)功(gong)能(neng)介紹 全站(zhan)儀(yi)(yi)有什么(me)作用
一、全站儀是什么
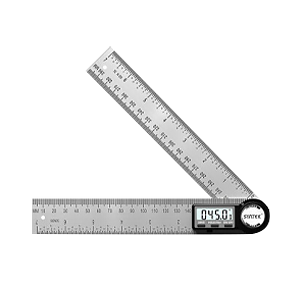
全站儀,即(ji)全站(zhan)型(xing)(xing)電(dian)(dian)子測(ce)(ce)(ce)(ce)距儀(Electronic Total Station),是(shi)一(yi)種集(ji)光(guang)、機、電(dian)(dian)為(wei)(wei)一(yi)體(ti)的高(gao)技術測(ce)(ce)(ce)(ce)量儀器,是(shi)集(ji)水平角、垂直角、距離(斜(xie)距、平距)、高(gao)差測(ce)(ce)(ce)(ce)量功能于(yu)一(yi)體(ti)的測(ce)(ce)(ce)(ce)繪(hui)儀器系統。與光(guang)學(xue)經緯儀比較電(dian)(dian)子經緯儀將光(guang)學(xue)度盤換為(wei)(wei)光(guang)電(dian)(dian)掃描度盤,將人(ren)工光(guang)學(xue)測(ce)(ce)(ce)(ce)微讀(du)數(shu)代之(zhi)以(yi)自動記錄(lu)和顯(xian)示讀(du)數(shu),使測(ce)(ce)(ce)(ce)角操作簡單化(hua),且可避免讀(du)數(shu)誤差的產生(sheng)。因(yin)其(qi)一(yi)次(ci)安置儀器就可完(wan)成該(gai)測(ce)(ce)(ce)(ce)站(zhan)上(shang)全部測(ce)(ce)(ce)(ce)量工作,所(suo)以(yi)稱之(zhi)為(wei)(wei)全站(zhan)儀。廣泛用于(yu)地上(shang)大型(xing)(xing)建筑和地下隧道施工等精密(mi)工程測(ce)(ce)(ce)(ce)量或變形監(jian)測(ce)(ce)(ce)(ce)領(ling)域。
全站儀(yi)(yi)與光學經緯儀(yi)(yi)區(qu)別在(zai)于度(du)(du)(du)盤(pan)讀(du)數(shu)及顯(xian)示系統,電(dian)子經緯儀(yi)(yi)的(de)水平(ping)度(du)(du)(du)盤(pan)和豎直度(du)(du)(du)盤(pan)及其(qi)讀(du)數(shu)裝置是分別采(cai)用(編碼盤(pan))或(huo)兩個相(xiang)同的(de)光柵度(du)(du)(du)盤(pan)和讀(du)數(shu)傳感器進行(xing)角(jiao)度(du)(du)(du)測量的(de)。根據測角(jiao)精度(du)(du)(du)可分為0.5″,1″,2″,3″,5″,10″等幾(ji)個等級。
二、全站儀功能介紹
全(quan)站(zhan)儀(yi)是人們在(zai)角度測量(liang)自動化的過(guo)程中應運而(er)生的,各(ge)類電子經緯(wei)儀(yi)在(zai)各(ge)種(zhong)測繪作(zuo)業中起著巨大的作(zuo)用(yong)。
全站儀的發展經歷了從組合式即光電測距儀與光學經緯儀組合,或光電測距儀與電子經緯儀組合,到整體式即將光電測距儀的光波發射接收系統的光軸和經緯儀的視準軸組合為同軸的整體式全站儀等幾個階段。
最初速(su)(su)測(ce)儀(yi)(yi)的(de)(de)距離測(ce)量是通過光學(xue)(xue)方法(fa)來實現的(de)(de),我們(men)稱這種(zhong)速(su)(su)測(ce)儀(yi)(yi)為“光學(xue)(xue)速(su)(su)測(ce)儀(yi)(yi)”。實際上,“光學(xue)(xue)速(su)(su)測(ce)儀(yi)(yi)”就是指帶(dai)有視距絲的(de)(de)經緯儀(yi)(yi),被測(ce)點(dian)的(de)(de)平面位置(zhi)由方向測(ce)量及(ji)光學(xue)(xue)視距來確(que)定(ding),而高程則是用三角測(ce)量方法(fa)來確(que)定(ding)的(de)(de)。
帶有“視距(ju)絲”的(de)光學速測(ce)(ce)儀,由(you)于其快速、簡易,而在短距(ju)離(100米以內)、低精(jing)度(du) (1/200(1/500)的(de)測(ce)(ce)量中,如碎部點測(ce)(ce)定中,有其優勢,得到了廣(guang)泛的(de)應用。
隨(sui)著(zhu)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)測(ce)(ce)距(ju)(ju)技術(shu)的(de)(de)(de)(de)出(chu)現(xian)(xian)(xian),大(da)大(da)地(di)(di)推動了(le)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)的(de)(de)(de)(de)發(fa)(fa)展。用(yong)電(dian)(dian)(dian)(dian)(dian)磁波測(ce)(ce)距(ju)(ju)儀(yi)(yi)(yi)(yi)(yi)代替光(guang)(guang)學(xue)視(shi)距(ju)(ju)經緯(wei)儀(yi)(yi)(yi)(yi)(yi),使得(de)測(ce)(ce)程(cheng)更(geng)大(da)、測(ce)(ce)量(liang)時(shi)間更(geng)短、精度更(geng)高(gao)。人們將距(ju)(ju)離(li)由電(dian)(dian)(dian)(dian)(dian)磁波測(ce)(ce)距(ju)(ju)儀(yi)(yi)(yi)(yi)(yi)測(ce)(ce)定的(de)(de)(de)(de)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)籠(long)統地(di)(di)稱之(zhi)(zhi)為(wei)(wei)“電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)”(Electronic Tachymeter)。然而,隨(sui)著(zhu)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)測(ce)(ce)角(jiao)技術(shu)的(de)(de)(de)(de)出(chu)現(xian)(xian)(xian)。這(zhe)(zhe)一“電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)”的(de)(de)(de)(de)概念又相應地(di)(di)發(fa)(fa)生了(le)變化,根據測(ce)(ce)角(jiao)方(fang)法的(de)(de)(de)(de)不同(tong)分為(wei)(wei)半(ban)站(zhan)(zhan)型(xing)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)和(he)全(quan)站(zhan)(zhan)型(xing)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)。半(ban)站(zhan)(zhan)型(xing)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)是指用(yong)光(guang)(guang)學(xue)方(fang)法測(ce)(ce)角(jiao)的(de)(de)(de)(de)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi),也有稱之(zhi)(zhi)為(wei)(wei)“測(ce)(ce)距(ju)(ju)經緯(wei)儀(yi)(yi)(yi)(yi)(yi)”。這(zhe)(zhe)種速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)出(chu)現(xian)(xian)(xian)較早(zao),并(bing)且進行(xing)了(le)不斷的(de)(de)(de)(de)改進,可(ke)將光(guang)(guang)學(xue)角(jiao)度讀數通過(guo)鍵盤(pan)輸入到測(ce)(ce)距(ju)(ju)儀(yi)(yi)(yi)(yi)(yi),對斜距(ju)(ju)進行(xing)化算,最(zui)后得(de)出(chu)平距(ju)(ju)、高(gao)差、方(fang)向(xiang)角(jiao)和(he)坐(zuo)標(biao)差,這(zhe)(zhe)些結(jie)果都可(ke)自動地(di)(di)傳輸到外(wai)(wai)部(bu)存儲(chu)器中。全(quan)站(zhan)(zhan)型(xing)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)則是由電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)測(ce)(ce)角(jiao)、電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)測(ce)(ce)距(ju)(ju)、電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)計算和(he)數據存儲(chu)單元等組成的(de)(de)(de)(de)三維坐(zuo)標(biao)測(ce)(ce)量(liang)系統,測(ce)(ce)量(liang)結(jie)果能自動顯示,并(bing)能與外(wai)(wai)圍設(she)備交換(huan)信息的(de)(de)(de)(de)多功能測(ce)(ce)量(liang)儀(yi)(yi)(yi)(yi)(yi)器。由于全(quan)站(zhan)(zhan)型(xing)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)較完(wan)善地(di)(di)實現(xian)(xian)(xian)了(le)測(ce)(ce)量(liang)和(he)處理過(guo)程(cheng)的(de)(de)(de)(de)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)化和(he)一體化,所以人們也通常稱之(zhi)(zhi)為(wei)(wei)全(quan)站(zhan)(zhan)型(xing)電(dian)(dian)(dian)(dian)(dian)子(zi)(zi)速(su)(su)(su)測(ce)(ce)儀(yi)(yi)(yi)(yi)(yi)或簡稱全(quan)站(zhan)(zhan)儀(yi)(yi)(yi)(yi)(yi)。
全站儀有什么作用
1、測角功能:測量水平角、豎直角或天頂距;
2、測距功能:測量平距、斜距或高差;
3、跟蹤測量:即跟蹤測距和跟蹤測角;
4、連續測量:角度或距離分別連續測量或同時連續測量。
5、坐標測量:在已知點上架設儀器,根據測站點和定向點的坐標或定向方位角,對任一目標點進行觀測,獲得目標點的三維坐標值。
6、懸高測量[REM]:可將(jiang)反射(she)鏡立(li)于懸物(wu)的垂(chui)點下,觀(guan)測(ce)棱鏡,再抬高望遠鏡瞄(miao)準懸物(wu),即(ji)可得到懸物(wu)到地面的高度。
7、對邊測量[MLM]:可迅(xun)速測出棱鏡(jing)點到測站點的平距、斜(xie)距和高差。
8、后方交會:儀器測站點坐標可以通過觀測兩坐標值存儲于內存中的已知點求得。
9、距離放樣:可將設計距離與實際距離進行差值比較迅速將設計距離放到實地。
10、坐標放樣:已知儀器點坐標和后視點坐標或已知儀器點坐標和后視方位角,即可進行三維坐標放樣,需要時也可進行坐標變換。
11、預置參數:可預置溫度、氣壓、棱鏡常數等參數。
12、測量的記錄、通訊傳輸功能。