一、交流伺服電動機的特點有哪些
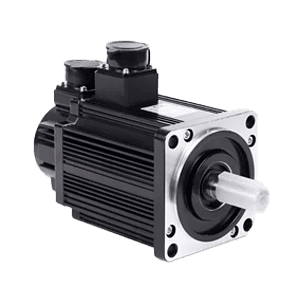
交(jiao)流伺(si)服電(dian)(dian)(dian)動機(ji)(ji)是將電(dian)(dian)(dian)能轉變為機(ji)(ji)械(xie)能的(de)機(ji)(ji)器,由(you)一個用以產生磁場的(de)電(dian)(dian)(dian)磁鐵繞(rao)組(zu)或(huo)分(fen)布的(de)定子(zi)繞(rao)組(zu)和(he)一個旋轉電(dian)(dian)(dian)樞(shu)或(huo)轉子(zi)組(zu)成,它結構上類似(si)于單(dan)相異步電(dian)(dian)(dian)動機(ji)(ji),不過和(he)普(pu)通電(dian)(dian)(dian)機(ji)(ji)相比,交(jiao)流伺(si)服電(dian)(dian)(dian)動機(ji)(ji)有三個明顯的(de)特點:
1、起動轉矩大
由于轉子(zi)電阻大(da),與普(pu)通異步電動機(ji)的轉矩(ju)特(te)(te)性(xing)(xing)曲線相(xiang)比,有明(ming)顯的區別。它可(ke)使臨界轉差率(lv)S0>1,這樣(yang)不僅使轉矩(ju)特(te)(te)性(xing)(xing)(機(ji)械(xie)特(te)(te)性(xing)(xing))更(geng)接近于線性(xing)(xing),而且具有較大(da)的起動轉矩(ju)。因此,當定子(zi)一有控制電壓,轉子(zi)立即轉動,即具有起動快(kuai)、靈敏度高的特(te)(te)點。
2、運行范圍較寬
轉(zhuan)差率S在0到1的范圍內(nei),交流伺(si)服電(dian)動(dong)機都能穩定運(yun)轉(zhuan)。
3、無自轉現象
正常(chang)運(yun)(yun)轉的伺服(fu)(fu)電(dian)動(dong)(dong)機,只要(yao)失去(qu)控(kong)制電(dian)壓,電(dian)機立即停止運(yun)(yun)轉。當伺服(fu)(fu)電(dian)動(dong)(dong)機失去(qu)控(kong)制電(dian)壓后,它處(chu)于單相運(yun)(yun)行狀態(tai),由于轉子電(dian)阻大,這時的合成轉矩T是制動(dong)(dong)轉矩,從而(er)使電(dian)動(dong)(dong)機迅速(su)停止運(yun)(yun)轉。
交(jiao)流伺服電(dian)動機運(yun)行平穩、噪(zao)音小,但控(kong)制特性是非線性的(de);并且(qie)由于轉子電(dian)阻(zu)大(da),損耗大(da),效(xiao)率低,因此與同容量直流伺服電(dian)動機相比,體積大(da)、重量重,所(suo)以只(zhi)適用于0.5-100W的(de)小功率控(kong)制系統(tong)。
二、交流伺服電機的控制原理是什么
在交流伺服(fu)電(dian)動機(ji)中,除(chu)了(le)要求電(dian)動機(ji)不能(neng)“自轉”外,還要求改變加在控制繞組(zu)上的電(dian)壓的大(da)小和相(xiang)位(wei)能(neng)夠(gou)改變電(dian)動機(ji)轉速的大(da)小和方(fang)向(xiang),這(zhe)其中的控制原理是:
根(gen)據旋(xuan)轉磁(ci)(ci)動(dong)(dong)勢理論,勵磁(ci)(ci)繞組(zu)和控(kong)制繞組(zu)共同(tong)作(zuo)用產(chan)生(sheng)的(de)(de)是一個旋(xuan)轉磁(ci)(ci)場(chang),旋(xuan)轉磁(ci)(ci)場(chang)的(de)(de)旋(xuan)轉方向(xiang)是由相(xiang)位(wei)(wei)超前(qian)(qian)的(de)(de)繞組(zu)轉向(xiang)相(xiang)位(wei)(wei)滯后(hou)的(de)(de)繞組(zu)。改(gai)(gai)變(bian)控(kong)制繞組(zu)中(zhong)控(kong)制電(dian)壓(ya)的(de)(de)相(xiang)位(wei)(wei),可(ke)以(yi)改(gai)(gai)變(bian)兩相(xiang)繞組(zu)的(de)(de)超前(qian)(qian)滯后(hou)關(guan)系,從(cong)而改(gai)(gai)變(bian)旋(xuan)轉磁(ci)(ci)場(chang)的(de)(de)旋(xuan)轉方向(xiang),交(jiao)流(liu)(liu)伺(si)服電(dian)動(dong)(dong)機(ji)(ji)轉速方向(xiang)也(ye)會(hui)發生(sheng)變(bian)化。改(gai)(gai)變(bian)控(kong)制電(dian)壓(ya)的(de)(de)大小(xiao)和相(xiang)位(wei)(wei),可(ke)以(yi)改(gai)(gai)變(bian)旋(xuan)轉磁(ci)(ci)場(chang)的(de)(de)磁(ci)(ci)通(tong),從(cong)而改(gai)(gai)變(bian)電(dian)動(dong)(dong)機(ji)(ji)的(de)(de)電(dian)磁(ci)(ci)轉矩,交(jiao)流(liu)(liu)伺(si)服電(dian)動(dong)(dong)機(ji)(ji)轉速也(ye)會(hui)發生(sheng)變(bian)化。
三、交流伺服電機的控制方式
交流伺服電動機有(you)幅值控制(zhi)、相位(wei)控制(zhi)和(he)幅相控制(zhi)三種轉速控制(zhi)方法:
1、幅值控制
通過改變控制電壓Uc的幅值來控制電動機的轉速,而Uc的相位始終保持不變,使控制電流Ic與勵磁電流If保持(chi)90°電角(jiao)度的相位(wei)關系(xi)。
2、相位控制
通過改變控制電壓Uc的相位,從而改變控制電流Ic與勵磁電流If之間的相位角來控制電動機的轉速,在這種情況下,控制電壓Uc的大小保持不變。
3、幅相控制
通過同時改變控制電壓Uc的幅值及Ic與If之間的相位角來(lai)控制電動機(ji)的轉速,這(zhe)種(zhong)控制方(fang)法雖(sui)然機(ji)械特性和調節特性較差(cha),但(dan)它所采用的控制設(she)備簡(jian)單,不用移相裝置,因此使用更廣(guang)泛。