一、伺服電機的調試方法步驟
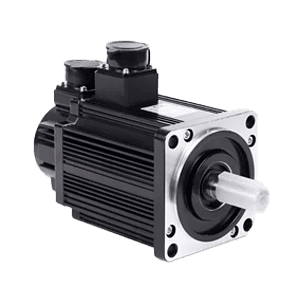
伺服電機是指在伺服系統中控制機械元件的電機,在使用之前,需要進行調試,伺服電機的調試步驟如下:
1、初始化參數
在控制卡(ka)上(shang):選好(hao)控制方(fang)式;將PID參數清零(ling);讓控制卡(ka)上(shang)電時默認使能信號關閉;將此(ci)狀態保存,確保控制卡(ka)再次上(shang)電時即為此(ci)狀態。
在伺服電機(ji)(ji)上:設(she)置(zhi)(zhi)控(kong)(kong)制方式(shi);設(she)置(zhi)(zhi)使能由(you)外部控(kong)(kong)制;編碼器信號(hao)(hao)輸(shu)出的(de)齒輪比(bi);設(she)置(zhi)(zhi)控(kong)(kong)制信號(hao)(hao)與電機(ji)(ji)轉(zhuan)速(su)的(de)比(bi)例關系。一般來(lai)說,建議使伺服工(gong)作(zuo)中的(de)最(zui)大設(she)計轉(zhuan)速(su)對應9V的(de)控(kong)(kong)制電壓。比(bi)如,設(she)置(zhi)(zhi)1V電壓對應的(de)轉(zhuan)速(su),出廠值為(wei)(wei)500,如果你(ni)只準(zhun)備(bei)讓電機(ji)(ji)在1000轉(zhuan)以下工(gong)作(zuo),那么(me),將這個參數設(she)置(zhi)(zhi)為(wei)(wei)111。
2、接線
控制卡(ka)斷電,連接控制卡(ka)與(yu)伺(si)服之間的(de)(de)信號線(xian)(xian)(xian)。接線(xian)(xian)(xian)主要(yao)接控制卡(ka)的(de)(de)模擬(ni)量輸(shu)出(chu)(chu)線(xian)(xian)(xian)、使能信號線(xian)(xian)(xian)、伺(si)服輸(shu)出(chu)(chu)的(de)(de)編碼(ma)(ma)器信號線(xian)(xian)(xian)。復(fu)查接線(xian)(xian)(xian)沒(mei)有(you)錯誤后,電機(ji)和(he)控制卡(ka)(以(yi)及PC)上電。用外力轉動電機(ji),檢查控制卡(ka)是否(fou)可以(yi)正確檢測(ce)到電機(ji)位置的(de)(de)變(bian)化,否(fou)則檢查編碼(ma)(ma)器信號的(de)(de)接線(xian)(xian)(xian)和(he)設置。
3、試方向
通過(guo)(guo)控(kong)制(zhi)(zhi)(zhi)卡(ka)打開伺(si)(si)服(fu)的使(shi)(shi)能信號,這時(shi)伺(si)(si)服(fu)應該以(yi)一(yi)個較低的速(su)度(du)轉(zhuan)動,這就(jiu)是(shi)“零漂(piao)”。一(yi)般控(kong)制(zhi)(zhi)(zhi)卡(ka)上(shang)都會有抑(yi)制(zhi)(zhi)(zhi)零漂(piao)的指(zhi)令(ling)或參數(shu)(shu),使(shi)(shi)用這個指(zhi)令(ling)或參數(shu)(shu),看電機(ji)(ji)的轉(zhuan)速(su)和方(fang)向是(shi)否可以(yi)通過(guo)(guo)這個指(zhi)令(ling)(參數(shu)(shu))控(kong)制(zhi)(zhi)(zhi)。如(ru)果(guo)不能控(kong)制(zhi)(zhi)(zhi),檢查模擬量接線及(ji)控(kong)制(zhi)(zhi)(zhi)方(fang)式的參數(shu)(shu)設置。確認(ren)給出(chu)(chu)正(zheng)數(shu)(shu),電機(ji)(ji)正(zheng)轉(zhuan),編碼器計數(shu)(shu)增加;給出(chu)(chu)負數(shu)(shu),電機(ji)(ji)反轉(zhuan)轉(zhuan),編碼器計數(shu)(shu)減小。如(ru)果(guo)電機(ji)(ji)帶有負載,行程有限,不要采用這種方(fang)式。測試(shi)不要給過(guo)(guo)大(da)的電壓(ya),建(jian)議在1V以(yi)下。如(ru)果(guo)方(fang)向不一(yi)致(zhi),可以(yi)修改控(kong)制(zhi)(zhi)(zhi)卡(ka)或電機(ji)(ji)上(shang)的參數(shu)(shu),使(shi)(shi)其(qi)一(yi)致(zhi)。
4、抑制零漂
使用(yong)控制(zhi)卡或伺服上(shang)抑(yi)制(zhi)零(ling)(ling)飄(piao)的參數,仔細(xi)調整,使電(dian)機的轉速趨近于零(ling)(ling)。由(you)于零(ling)(ling)漂本(ben)身(shen)也有一定的隨機性,所以不(bu)必要求電(dian)機轉速絕對為零(ling)(ling)。
5、建立閉環控制
再次通過(guo)控制(zhi)卡(ka)(ka)(ka)將伺服使能信號放開,在控制(zhi)卡(ka)(ka)(ka)上輸入一個較小(xiao)的(de)比例增益,至于多大算較小(xiao),這只能憑感覺了,如果實(shi)在不(bu)放心,就輸入控制(zhi)卡(ka)(ka)(ka)能允許的(de)最小(xiao)值。
6、調整閉環參數
細調控制(zhi)(zhi)參數(shu),確保電機按照控制(zhi)(zhi)卡(ka)的(de)指(zhi)令(ling)運動,這(zhe)是必須要做的(de)工作(zuo),這(zhe)部(bu)分的(de)工作(zuo),主要是看經驗(yan)。
二、調試伺服電機要注意哪些事項
1、伺服(fu)電機可以用(yong)在會(hui)受水或(huo)油(you)滴侵襲(xi)的(de)場所,但(dan)是它不是全防水或(huo)防油(you)的(de)。因此,伺服(fu)電機不應當放(fang)置(zhi)或(huo)使用(yong)在水中(zhong)或(huo)油(you)的(de)環境中(zhong)。
2、如(ru)果伺服電(dian)機連(lian)接到一個減(jian)速(su)齒(chi)(chi)輪,使用伺服電(dian)機時應當加(jia)油(you)封,以(yi)防止減(jian)速(su)齒(chi)(chi)輪的油(you)進(jin)入(ru)伺服電(dian)機。
3、伺服電機的電纜不要浸沒在油(you)或水中。
4、確保電纜(lan)不(bu)因(yin)外部彎曲(qu)力或自身(shen)重量而受到力矩或垂直負(fu)荷,尤其(qi)是在電纜(lan)出口處或連接處。
5、在伺服電機移動的(de)(de)情況下(xia),應(ying)把電纜(lan)(lan)(就(jiu)是隨電機配(pei)置(zhi)的(de)(de)那(nei)根)牢(lao)固地(di)固定(ding)到(dao)一(yi)個(ge)(ge)靜(jing)止的(de)(de)部分(相對電機),并(bing)且應(ying)當(dang)用(yong)一(yi)個(ge)(ge)裝在電纜(lan)(lan)支座里的(de)(de)附加電纜(lan)(lan)來(lai)延長它,這樣彎曲應(ying)力(li)可以減到(dao)最小。
6、電纜的彎(wan)頭(tou)半(ban)徑做(zuo)到盡可能大。