農業機器人是指運用在在農業生產中的智能機器人,是一種可由不同程序軟件控制,以適應各種作業,能感(gan)覺并(bing)適應作(zuo)物種類或環境變化,有檢測(如視覺等)和演算等人(ren)(ren)工智能的新(xin)一代無人(ren)(ren)自(zi)動操作機(ji)(ji)(ji)械。同工業(ye)(ye)機(ji)(ji)(ji)器(qi)人(ren)(ren)或者其他領域機(ji)(ji)(ji)器(qi)人(ren)(ren)相比,農業(ye)(ye)機(ji)(ji)(ji)器(qi)人(ren)(ren)工作環境(jing)多變(bian),以非(fei)結構環境(jing)為主,工作任務具有極(ji)大的挑(tiao)戰性。因此(ci),一般而言,農業(ye)(ye)機(ji)(ji)(ji)器(qi)人(ren)(ren)對智能化程(cheng)度的要求要遠高于其他領域機(ji)(ji)(ji)器(qi)人(ren)(ren)。
農業機器人的歷史分為兩(liang)個階段,2000年(nian)以前農業(ye)機器人是機械電器自(zi)動化設備(bei),2000年以后是(shi)加入人工智能、機器視覺等新技術的自動(dong)化設備。
上世紀80年(nian)代開始,一些發(fa)達國(guo)家由(you)于地多(duo)人少(shao)的(de)(de)原(yuan)因,就已經開始致力于農(nong)(nong)業(ye)機(ji)器(qi)人的(de)(de)研發(fa)工作,并相繼(ji)研制出(chu)(chu)了(le)嫁接、扦插、移(yi)栽和采摘等多(duo)種農(nong)(nong)業(ye)生產機(ji)器(qi)人。機(ji)器(qi)人在農(nong)(nong)業(ye)領域(yu)的(de)(de)出(chu)(chu)現和應(ying)用,為這些國(guo)家的(de)(de)農(nong)(nong)業(ye)自動化、精準化、智能化發(fa)展帶(dai)來了(le)強勁動力。
2007年掃(sao)描果實(shi)并收(shou)集土壤(rang)、種子數據的Ag Tracker被發明出來。
2012年(nian)能夠在植(zhi)物育苗室內移動盆(pen)栽樹苗的機器(qi)人——收(shou)獲運輸車HV-100被研發(fa)出來,同(tong)年能(neng)夠除去生(sheng)菜土(tu)地里多余種子的(de)生(sheng)菜機(ji)器人Lettuce bot誕生(sheng),2012年(nian)還誕生了剪(jian)除或者栽培(pei)葡萄藤的Wall-Ye機(ji)器人,該機(ji)器人能夠(gou)收(shou)集(ji)土(tu)壤健(jian)康(kang)狀況和葡萄庫存的數據(ju)。
2013年采摘(zhai)草(cao)莓(mei)的機(ji)(ji)器人出生,該機(ji)(ji)器人使用(yong)兩個數碼相機(ji)(ji)來拍攝(she)草(cao)莓(mei)的顏色(se),判斷草(cao)莓(mei)的成熟程度,并且采摘(zhai)已熟的草(cao)莓(mei)。
目前種植水稻的(de)機(ji)器(qi)人正在研發中,該機(ji)器(qi)人能夠分析田地的(de)貧瘠等環境。
施肥機器人、耕耘機器人、除草機器人、噴藥機器人、蔬菜嫁接機器人、收割機器人(如番(fan)茄(qie)收獲(huo)機器人(ren))、采摘機器人(如采(cai)摘草莓機(ji)器人、采摘柑桔機器人(ren))等。
 該圖片由注冊用戶"科技數碼行"提供,版權聲明反饋
該圖片由注冊用戶"科技數碼行"提供,版權聲明反饋
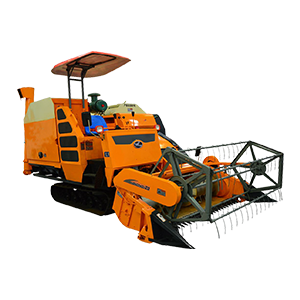
大(da)(da)田(tian)用(yong)農業機(ji)器(qi)(qi)人(ren)有大(da)(da)田(tian)播種機(ji)器(qi)(qi)人(ren)、大(da)(da)田(tian)收獲機(ji)器(qi)(qi)人(ren)、大(da)(da)田(tian)植保機(ji)器(qi)(qi)人(ren)、大(da)(da)田(tian)耕作機(ji)器(qi)(qi)人(ren)以及大(da)(da)田(tian)移栽機(ji)器(qi)(qi)人(ren)等(deng)。
大田果蔬采摘(zhai)作(zuo)業(ye)是生(sheng)產(chan)鏈(lian)中(zhong)最耗時和(he)費(fei)力的生(sheng)產(chan)環節之一。另(ling)外,采摘(zhai)作(zuo)業(ye)季節性(xing)強,勞(lao)動強度大,費(fei)用(yong)(yong)高,因此保證(zheng)果實適時采收、降(jiang)低收獲(huo)作(zuo)業(ye)強度及用(yong)(yong)工(gong)費(fei)用(yong)(yong)是保證(zheng)農業(ye)增(zeng)收的重要(yao)途徑。然(ran)而,由(you)于采摘(zhai)作(zuo)業(ye)的復雜(za)性(xing),采摘(zhai)自動化程度仍(reng)然(ran)很低。目前,國(guo)內(nei)外水果采摘(zhai)作(zuo)業(ye)基(ji)本上都是人工(gong)進行,其(qi)費(fei)用(yong)(yong)約占成本的30%~50%,并且(qie)時(shi)間較為(wei)集中,勞(lao)動量大,工時(shi)緊張(zhang)。大田果蔬采摘機器(qi)人(ren)(ren)作為(wei)農(nong)業(ye)機器(qi)人(ren)(ren)的(de)重(zhong)要類型,在降低(di)工人(ren)(ren)勞(lao)動強(qiang)度(du)和生產(chan)費用、提高勞(lao)動生產(chan)率和產(chan)品質量、保證(zheng)果實適時(shi)采收等方面(mian)具有巨大的(de)發展潛力。
設施農業用機器人有嫁接機器人、花卉插枝機器人、蔬菜收獲(huo)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)、植物工廠機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)和分揀(jian)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)等。其(qi)中,嫁(jia)(jia)接(jie)(jie)(jie)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)包括蔬菜嫁(jia)(jia)接(jie)(jie)(jie)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)和油茶嫁(jia)(jia)接(jie)(jie)(jie)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)等。目前(qian),嫁(jia)(jia)接(jie)(jie)(jie)繁殖技術較為成熟,而人(ren)(ren)(ren)(ren)(ren)工嫁(jia)(jia)接(jie)(jie)(jie)效率較低,因此加大嫁(jia)(jia)接(jie)(jie)(jie)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)的(de)(de)(de)研究投入,推(tui)進高速和高質的(de)(de)(de)嫁(jia)(jia)接(jie)(jie)(jie)機器(qi)(qi)人(ren)(ren)(ren)(ren)(ren)的(de)(de)(de)推(tui)廣與應用,可取得可觀的(de)(de)(de)直接(jie)(jie)(jie)經濟利益及(ji)生態環境價值。
嫁接(jie)機器人工作(zuo)(zuo)時(shi)只需操作(zuo)(zuo)者將砧木盤及接(jie)穗盤各自(zi)放入指定位置,便(bian)可自(zi)主完成抓穗、切(qie)苗、接(jie)合、固(gu)定和排苗等作(zuo)(zuo)業項(xiang)目,省時(shi)高(gao)效(xiao),成活率高(gao)。
目前,農產品加工機器人有肉類加工機器人、擠奶機器人、剪羊毛機器人和食品安全鑒定機器人等。
1、農(nong)業(ye)機器人作業(ye)季節性較(jiao)強。
農產(chan)品生產(chan)的季節性較(jiao)強,并且農業(ye)機(ji)器(qi)人(ren)(ren)的針對性較(jiao)強、功能單一。因此,農業(ye)機(ji)器(qi)人(ren)(ren)的使用(yong)也具(ju)有(you)較(jiao)強的季節性,從而(er)造成農業(ye)機(ji)器(qi)人(ren)(ren)的利(li)用(yong)率低,增加了農業(ye)機(ji)器(qi)人(ren)(ren)的使用(yong)成本。
2、農業機器(qi)人作業環境復雜多變。
工業機器(qi)(qi)人(ren)作(zuo)(zuo)業環境比較(jiao)固定,而農(nong)業機器(qi)(qi)人(ren)的作(zuo)(zuo)業環境一(yi)般難以預知。因此,農(nong)田作(zuo)(zuo)業的機器(qi)(qi)人(ren)需要(yao)有(you)較(jiao)強的環境識別能力,且還要(yao)對(dui)不(bu)同(tong)環境有(you)不(bu)同(tong)的動作(zuo)(zuo)反應。
3、作業(ye)對象的嬌嫩(nen)和復雜性(xing)。
農業機器人(ren)的(de)(de)作(zuo)業對(dui)(dui)象(xiang)是(shi)農作(zuo)物,而農作(zuo)物的(de)(de)嬌嫩(nen)性(xing)對(dui)(dui)農業機器人(ren)的(de)(de)動作(zuo)提出了更(geng)高(gao)的(de)(de)要(yao)求:農業機器人(ren)的(de)(de)執行末端(duan)與作(zuo)業對(dui)(dui)象(xiang)接(jie)觸時需要(yao)進行柔性(xing)處理;農業機器人(ren)的(de)(de)作(zuo)業對(dui)(dui)象(xiang)形狀(zhuang)復雜,農(nong)作物(wu)的(de)(de)生長發育受周圍環(huan)境的(de)(de)影響較大,因此農(nong)作物(wu)的(de)(de)空間形(xing)態具有(you)很大的(de)(de)不(bu)確定(ding)性,從而要求農(nong)業機(ji)器人對不(bu)同(tong)的(de)(de)空間形(xing)態進行判斷,以實現不(bu)同(tong)的(de)(de)動(dong)作。
 該圖片由注冊用戶"科技數碼行"提供,版權聲明反饋
該圖片由注冊用戶"科技數碼行"提供,版權聲明反饋
4、農業機器人使(shi)用(yong)對象的特殊(shu)性。
農業機器人(ren)(ren)的(de)使用(yong)對象是(shi)農民。隨著人(ren)(ren)口老齡化程度的(de)提高,從事農業生產的(de)人(ren)(ren)口也將步入老齡化時代。因此,需(xu)要農業機器人(ren)(ren)必須(xu)具有高可靠性和(he)操作簡單(dan)等特點。
5、農(nong)業機器人價格的(de)特殊性。
農業機器人的(de)前期(qi)研發(fa)投入(ru)較(jiao)大(da),結構復雜(za),制造成本較(jiao)高,導致價格(ge)昂貴,超出(chu)了一般(ban)農民的(de)承受(shou)能力。
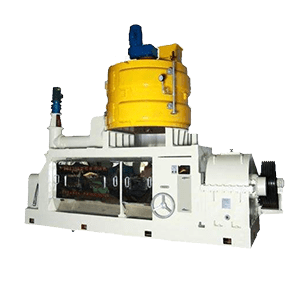
首先要介紹的世(shi)界超級大國(guo)——美國。美國明尼蘇達一(yi)家農業機(ji)械公司研制除了一(yi)款(kuan)獨(du)特的(de)(de)(de)(de)施(shi)肥(fei)機(ji)器(qi)人,它可以(yi)根據(ju)不同類型土壤的(de)(de)(de)(de)實際情況(kuang),制定不同的(de)(de)(de)(de)施(shi)肥(fei)策略。由于機(ji)器(qi)人可以(yi)科學(xue)配比出最(zui)適量的(de)(de)(de)(de)施(shi)肥(fei)方(fang)案,幾(ji)乎不會再(zai)出現(xian)肥(fei)料浪費的(de)(de)(de)(de)情況(kuang),大幅降低(di)(di)了農業成本。而且精通肥(fei)料學(xue)的(de)(de)(de)(de)機(ji)器(qi)人還知道如何施(shi)肥(fei)才能把對環境的(de)(de)(de)(de)影(ying)響(xiang)降到最(zui)低(di)(di)。
接(jie)下(xia)來要介紹的是以嚴謹著(zhu)稱的德(de)國。德(de)國人一向以精通高精尖(jian)享譽(yu)世界,在人工智能(neng)領域(yu)他們(men)又怎(zen)會落后?德國(guo)農業專家研制出的除草機器人BoniRob,可(ke)以(yi)在農場的各種地(di)塊間極(ji)速穿行,準確找到雜草并(bing)清(qing)除,每分鐘(zhong)可(ke)以(yi)除掉(diao)120根雜草,比人(ren)工和藥物除草都要快得多。
而在盛產(chan)蘑(mo)菇的英(ying)國,希(xi)爾索農機研究所研制出了一款(kuan)可(ke)以高速(su)采摘(zhai)(zhai)蘑(mo)菇的機器人,它的采摘(zhai)(zhai)效(xiao)率是人工采摘(zhai)(zhai)的兩倍(bei),每(mei)分鐘可(ke)以采摘(zhai)(zhai)40個蘑菇(gu)(gu)。這款機器人通過視(shi)覺圖像分(fen)析軟件來(lai)識別蘑菇(gu)(gu)的(de)(de)數量和等級(ji),然后用紅外(wai)線測距儀測定(ding)蘑菇(gu)(gu)的(de)(de)高度(du),再由真空(kong)吸柄根據計算(suan)得出的(de)(de)具體情況確定(ding)需要彎曲和扭轉的(de)(de)力度(du),從而自動(dong)完成蘑菇(gu)(gu)采摘。
最后要介紹(shao)的(de)是以葡萄酒聞名(ming)世(shi)界(jie)的(de)法(fa)(fa)國(guo)(guo)。眾所周知,法(fa)(fa)國(guo)(guo)的(de)葡萄酒業異常繁榮,由此帶(dai)來的(de)是法(fa)(fa)國(guo)(guo)葡萄種(zhong)(zhong)植(zhi)業的(de)發(fa)達(da)。而當前法(fa)(fa)國(guo)(guo)種(zhong)(zhong)植(zhi)園的(de)工人們卻(que)在擔心他們的(de)工作(zuo)將會被一款名(ming)叫Wall-Ye的機(ji)器(qi)人取代。據悉,Wall-Ye是(shi)專為葡萄園所研(yan)發的(de)一款農業機器人,從植(zhi)株修(xiu)剪、監控土壤情況到打理藤蔓的(de)健康狀況,所有種植(zhi)園工人能做的(de)工作,Wall-Ye都(dou)能一手包辦。
與(yu)國(guo)外相比,我(wo)國(guo)農業(ye)機器(qi)人研究(jiu)與(yu)開發方面尚處于起步(bu)階段。我(wo)國(guo)農業(ye)機器(qi)人起步(bu)較晚,20世紀90年代中期(qi),國(guo)內才開始了農業機器人技(ji)術(shu)的研發。
目前我國(guo)已(yi)開發出的農業(ye)機器(qi)人有(you):耕耘機器(qi)人、除草機器(qi)人、施肥機器(qi)人、噴藥機器(qi)人、蔬菜(cai)嫁接機器(qi)人、收割(ge)機器(qi)人、采摘機器(qi)人等。
由機器(qi)(qi)人(ren)技術帶動(dong)的農業(ye)(ye)升級,正在為(wei)農民生活改(gai)善打開(kai)新(xin)空間。農業(ye)(ye)機器(qi)(qi)人(ren)除了可(ke)以(yi)從(cong)事(shi)種植、打農藥、收割等田地作(zuo)業(ye)(ye)之外,還(huan)可(ke)以(yi)在畜牧養殖業(ye)(ye)中發(fa)揮重要作(zuo)用(yong)。機器(qi)(qi)人(ren)將給農業(ye)(ye)帶來一場新(xin)的變革。
農業機器人將信息技術進行綜合集成,集感知、傳輸、控制、作業為一體,將農業的標準化、規范化大大向前推進了一步。不僅節省了人力成本,也提高了品質控制能力,增強了自然風險抗擊能力。并通過智能(neng)感知、識(shi)別技(ji)術與普(pu)適計算等通信感知技(ji)術將(jiang)農作物(wu)與物(wu)聯網連接起來,進行(xing)信息(xi)交換和(he)通訊,以實現智能(neng)化識(shi)別、定(ding)位、跟(gen)蹤、監控和(he)管理等功能(neng)。
隨著(zhu)中國(guo)(guo)工業(ye)化(hua)、城鎮化(hua)和現代化(hua)的快速發展,我(wo)國(guo)(guo)農業(ye)機(ji)器人的研發范圍亦在逐步擴大。
科(ke)技部在(zai)《服務機器人科(ke)技發展“十(shi)二五”專項(xiang)規劃》就(jiu)明確提出(chu)把服(fu)務機器(qi)人產業培育成我國未來(lai)戰(zhan)略(lve)性新興產業。按照銷量年(nian)均12%增長,售價14萬美(mei)元(yuan)一臺計算,至2021年(nian),全球農業機器人的銷售量將超過1.4萬臺,銷(xiao)售額將超(chao)過20億(yi)美元。