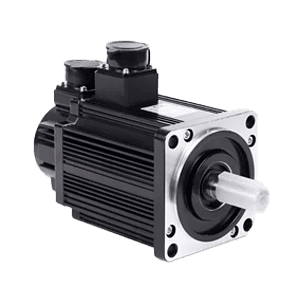
一、伺服驅動器是什么意思
伺服驅動器,又稱伺服控制器、伺服放大器,屬于伺服系統的一部分,主要應用于高精度的定位系統,是用來控制伺服電機的一種控(kong)制器(qi),通過位(wei)置、速(su)度和(he)力矩三種方式對伺服電機(ji)進行控(kong)制,實(shi)現高精(jing)度的傳動系統定位(wei)。
二、伺服驅動器的作用與功能
伺(si)服驅動(dong)器是驅動(dong)伺(si)服電機,使設備(bei)產生動(dong)力而(er)正常運(yun)轉的控制(zhi)器,它的功(gong)能細分的話有(you)很多種,包括:
1、參(can)數分組化設置、控制模(mo)式再線(xian)任意切換。
2、控制電源交流輸(shu)入(ru)、可(ke)設置的寬電壓輸(shu)入(ru)。
3、瞬(shun)間掉電快速停機保護(hu)功能。
4、再(zai)生制動(dong)(dong)、動(dong)(dong)態制動(dong)(dong)功能。
5、絕對值系統電壓(ya)監控,低壓(ya)警(jing)告功能。
6、調試(shi)軟件支持參(can)數(shu)管理(li)、監控、示波器功能。
三、伺服驅動器參數詳解
在自動(dong)(dong)化設備中(zhong),經常用(yong)到伺服(fu)電機,伺服(fu)電機一般是(shi)由(you)伺服(fu)驅動(dong)(dong)器來控(kong)制的,使(shi)用(yong)伺服(fu)驅動(dong)(dong)器需要了解它的一些參(can)數:
1、位置比例增益
設定位置環調(diao)節器的(de)比例增益,設置值越大(da),增益越高,剛(gang)度越大(da),相(xiang)同頻率(lv)指令脈沖條件下,位置滯后量越小;但數(shu)(shu)值太大(da)可能會引(yin)起振(zhen)蕩或超(chao)調(diao),參數(shu)(shu)數(shu)(shu)值由具體的(de)伺服系統型號和負(fu)載情況確(que)定。
2、位置前饋增益
設(she)定(ding)位置環的(de)前(qian)饋增益(yi),設(she)定(ding)值越(yue)大(da)時,表示(shi)在(zai)任何頻率的(de)指令脈沖下,位置滯后量(liang)越(yue)小,位置環的(de)前(qian)饋增益(yi)大(da),控(kong)制(zhi)系統(tong)的(de)高(gao)速響應特性提(ti)高(gao),但(dan)會使系統(tong)的(de)位置不穩定(ding),容易產生振蕩,因此,不需(xu)要很高(gao)的(de)響應特性時,本參(can)數通常設(she)為(wei)0(表示(shi)范圍:0~100%)。
3、速度比例增益
設(she)定速度調節(jie)器的比(bi)例增益,設(she)置(zhi)值(zhi)越(yue)大(da)(da),增益越(yue)高,剛度越(yue)大(da)(da)。參數數值(zhi)根據具(ju)體的伺服驅(qu)動系統型號和負載(zai)值(zhi)情況確定。一般(ban)情況下,負載(zai)慣量越(yue)大(da)(da),設(she)定值(zhi)越(yue)大(da)(da),在系統不產生振蕩的條件下,盡量設(she)定較大(da)(da)的值(zhi)。
4、速度積分時間常數
設(she)(she)定(ding)(ding)速度調(diao)節器(qi)的積分(fen)時間(jian)常數(shu),設(she)(she)置值(zhi)(zhi)越(yue)小(xiao),積分(fen)速度越(yue)快。參數(shu)數(shu)值(zhi)(zhi)根據具(ju)體的伺服驅動(dong)系統型(xing)號(hao)和負載情況確定(ding)(ding)。一般(ban)情況下,負載慣量(liang)越(yue)大,設(she)(she)定(ding)(ding)值(zhi)(zhi)越(yue)大,在系統不產生振(zhen)蕩的條(tiao)件(jian)下,盡量(liang)設(she)(she)定(ding)(ding)較小(xiao)的值(zhi)(zhi)。
5、速度反饋濾波因子
設定速(su)度(du)反饋低通濾波器(qi)特(te)性(xing),數值(zhi)(zhi)越大,截止(zhi)頻率(lv)(lv)越低,電機產生的(de)噪音越小;如果負載(zai)慣量很大,可(ke)以適當(dang)減(jian)小設定值(zhi)(zhi)。數值(zhi)(zhi)太(tai)大,造成響應(ying)變慢,可(ke)能(neng)會引起振蕩;數值(zhi)(zhi)越小,截止(zhi)頻率(lv)(lv)越高,速(su)度(du)反饋響應(ying)越快(kuai)。如果需要較高的(de)速(su)度(du)響應(ying),可(ke)以適當(dang)減(jian)小設定值(zhi)(zhi)。
6、最大輸出轉矩設置
設置伺服電機的內部轉(zhuan)矩限(xian)制(zhi)值,設置值是額定(ding)(ding)轉(zhuan)矩的百分比,任何時候,這個限(xian)制(zhi)都有效定(ding)(ding)位(wei)(wei)完成(cheng)范(fan)圍,設定(ding)(ding)位(wei)(wei)置控(kong)(kong)制(zhi)方(fang)式下定(ding)(ding)位(wei)(wei)完成(cheng)脈(mo)沖范(fan)圍。本(ben)參數(shu)(shu)(shu)(shu)提(ti)供了位(wei)(wei)置控(kong)(kong)制(zhi)方(fang)式下驅(qu)動器判斷是否完成(cheng)定(ding)(ding)位(wei)(wei)的依據,當位(wei)(wei)置偏差計(ji)數(shu)(shu)(shu)(shu)器內的剩余脈(mo)沖數(shu)(shu)(shu)(shu)小(xiao)于(yu)或等于(yu)本(ben)參數(shu)(shu)(shu)(shu)設定(ding)(ding)值時,驅(qu)動器認(ren)為定(ding)(ding)位(wei)(wei)已完成(cheng),到位(wei)(wei)開關信號(hao)為 ON,否則為OFF。
在(zai)位(wei)置控制方式(shi)時(shi)(shi)(shi),輸出(chu)位(wei)置定位(wei)完成信號,加減速時(shi)(shi)(shi)間常數,設置值是表(biao)示電機從(cong)0~2000r/min的加速時(shi)(shi)(shi)間或(huo)從(cong)2000~0r/min的減速時(shi)(shi)(shi)間,加減速特(te)性是線性的到達速度(du)范圍,設置到達速度(du)。在(zai)非(fei)位(wei)置控制方式(shi)下,如果(guo)電機速度(du)超(chao)過(guo)本設定值,則速度(du)到達開關信號為ON,否(fou)則為OFF。